Lesson 2
When and Why Do We Write Quadratic Equations?
- Let’s try to solve some quadratic equations.
Problem 1
A set of kitchen containers can be stacked to save space. The height of the stack is given by the expression \(1.5c + 7.6\), where \(c\) is the number of containers.
- Find the height of a stack made of 8 containers.
- A tower made of all the containers is 40.6 cm tall. How many containers are in the set?
- Noah looks at the equation and says, “7.6 must be the height of a single container.” Do you agree with Noah? Explain your reasoning.
Problem 2
Select all values of \(x\) that are solutions to the equation \((x-5)(7x-21)=0\).
-7
-5
-3
0
3
5
7
Problem 3
The expressions \(30x^2-105x-60\) and \((5x-20)(6x+3)\) define the same function, \(f\).
- Which expression makes it easier to find \(f(0)\)? Explain your reasoning.
- Find \(f(0)\).
- Which expression makes it easier to find the values of \(x\) that make the equation \(f(x)=0\) true? Explain or show your reasoning.
- Find the values of \(x\) that make \(f(x)=0\).
Problem 4
A band is traveling to a new city to perform a concert. The revenue from their ticket sales is a function of the ticket price, \(x\), and can be modeled with \((x-6)(250-5x)\).
What are the ticket prices at which the band would make no money at all?
Problem 5
Two students built a small rocket from a kit and attached an altimeter (a device for recording altitude or height) to the rocket. They record the height of the rocket over time since it is launched in the table, based on the data from the altimeter.
| time (seconds) | 0 | 1 | 3 | 4 | 7 | 8 |
|---|---|---|---|---|---|---|
| height (meters) | 0 | 110.25 | 236.25 | 252 | 110.25 | 0 |
Function \(h\) gives the height in meters as a function of time in seconds, \(t\).
- What is the value of \(h(3)\)?
- What value of \(t\) gives \(h(t) = 252\)?
- Explain why \(h(0) = h(8)\).
- Based on the data, which equation about the function could be true: \(h(2)=189\) or \(h(189) = 2\)? Explain your reasoning.
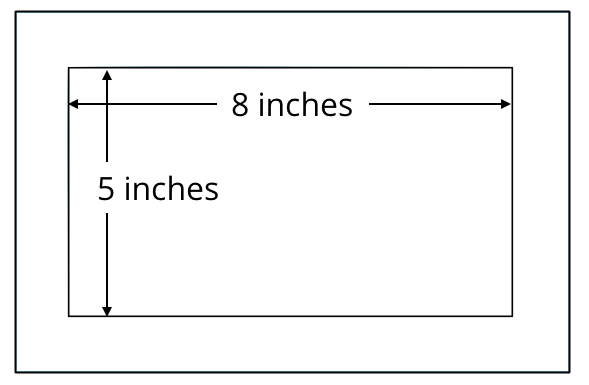
Problem 6
The screen of a tablet has dimensions 8 inches by 5 inches. The border around the screen has thickness \(x\).
-
Write an expression for the total area of the tablet, including the frame.
- Write an equation for which your expression is equal to 50.3125. Explain what a solution to this equation means in this situation.
- Try to find the solution to the equation. If you get stuck, try guessing and checking. It may help to think about tablets that you have seen.
Problem 7
Here are a few pairs of positive numbers whose sum is 15. The pair of numbers that have a sum of 15 and will produce the largest possible product is not shown.
Find this pair of numbers.
| first number |
second number |
product |
|---|---|---|
| 1 | 14 | 14 |
| 3 | 12 | 36 |
| 5 | 10 | 50 |
| 7 | 8 | 56 |
Problem 8
Kilometer is a measurement in the metric system, while mile is a measurement in the customary system. One kilometer equals approximately 0.621 mile.
- The number of miles, \(m\), is a function of the number of kilometers, \(k\). What equation can be written to represent this function?
- The number of kilometers, \(k\), is a function of the number of miles, \(m\). What equation can be written to represent this function?
- How are these two functions related? Explain how you know.